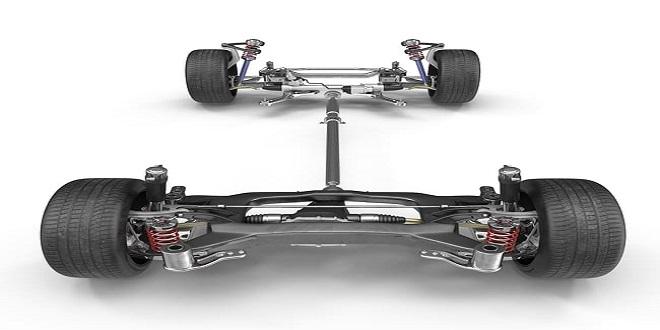
we concentrated on the behaviour of the front end of a car under vertical accelerations produced by irregularities in the road surface. For simplicity, we considered the front end of the car as a discrete mass supported on the main spring and an auxiliary spring (the tyre).
If we omit such rare examples as the Panther 6, which has four steered wheels at the front, we can define an automobile within the remit of this book as a single mass supported on four wheels, and it is the behaviour of this integrated sprung mass on its four suspension systems that is our concern.
In practice, the most complex patterns of behaviour can occur and at any moment in time, all four wheels can be moving up or down at differing frequencies, through different amplitudes and with phase differences between frequencies. With such formidable behaviour patterns, it is not surprising that many car manufacturers with extensive test and development facilities still fail to strike the right balance by the time the car goes into production and find it necessary to modify the suspension design at a later date.
Bouncing and pitching
Pure bounce will occur if the front and rear sprung masses are equal, the front and rear springs have identical frequencies and identical rates and are in phase. We could design a car to have a 50/50 weight distribution and identical springs all around, but the phasing of the ripples on the road surface is beyond our control. It is inevitable that a degree of rocking or seesawing, or pitching as it is known in this context, most often occurs.
The axis, in this case, passes through the centroid. we are interested in two polar moments of inertia. In a study of pitching the axis is horizontal (see Fig. 3.4). When we study the case of a car making rapid changes in direction, i.e. a racing car passing through a chicane, the axis of the relevant polar moment of inertia will be vertical.
Suspension theory
When a rigid body, such as a car body, is mounted on springs at both ends, and the front springs are subjected to vertical forces through the front wheels, oscillations are produced in both front and rear springs. A similar action occurs when the vertical forces are applied to the rear wheels. One of the earliest mathematical treatments of this reaction between the front and rear suspensions was presented by Professor J. J. Guest [1].
For simplification, lateral forces are not considered. Moreover, it is also assumed that both front wheels are subjected to identical vertical forces simultaneously.
The same conditions of identical forces in phase also apply to the rear springs. The mathematical model is, therefore, identical to our example of two pogo sticks connected by a rigid bar, as shown in Fig. 3.1.
The next stage of the Guest construction is to establish the dynamically conjugate points of the sprung mass. The moment of inertia of the sprung mass about the centroid is MK2.
Fig. 3.6 shows how the sprung mass for which =MK2 can be represented by discrete masses m 1 and m 2 at distances rand s from the centroid G. To satisfy the equation rs = K2, the following conditions must be met.
Last word
When G and C coincide, but c2 is not equal to K2, the point of intersection of the two hyperbolas moves to infinity. Point J is, therefore, also at infinity and point H coincides with G and C.


